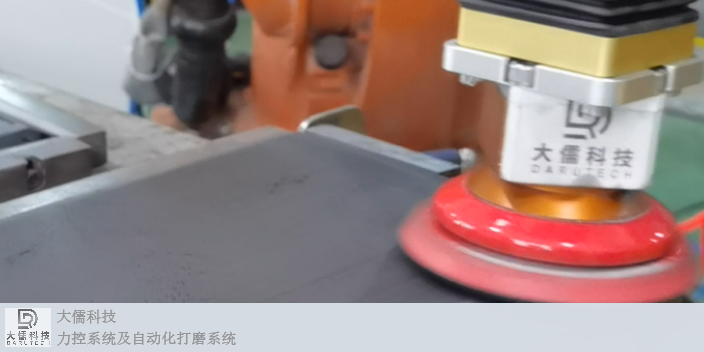
機器人自動化打磨拋光適用于各種類型工件和材料打磨拋光工藝的各個方面,常規(guī)復雜形狀工件的拋光需要由人工完成,不僅加工效率低��、產(chǎn)品一致性難以保證�、生產(chǎn)人員工作環(huán)境惡劣,同時管理成本較高,隨著用工成本和技工不確定性風險的上市,利用人口紅利創(chuàng)造產(chǎn)品利潤的時代已經(jīng)結束。自動化打磨方式使用先進DFC力控制技術使得打磨力控打磨能夠處理各種復雜形狀的工件����,并且保證了工件的加工質量和產(chǎn)品的一致性。通過在機器人上的DFC力控打磨執(zhí)行器,以及線性鏈接的DFC力控打磨控制器���,結合工件與打磨工具的磨損消耗計算方程��,使得系統(tǒng)能夠實現(xiàn)復雜磨削����,隨形拋或安裝三維數(shù)模尺寸拋都成為可能�����。實時反饋并控制打磨力在設定范圍內�,在線質量控制等功能,極大地提高了產(chǎn)品加工效率��,并保證了加工工件的質量高度一致性�。大儒科技(蘇州)有限公司力于提供力控打磨 �,有想法的可以來電咨詢�!安徽力控打磨詳情

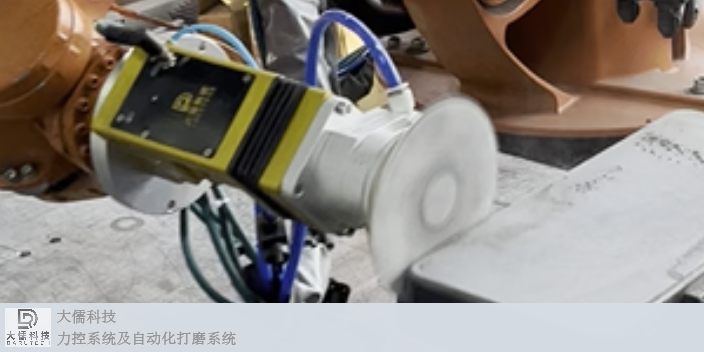
DFC力控打磨是用于自動化打磨拋光領域的力控制執(zhí)行系統(tǒng)。安裝于需要實現(xiàn)柔性智能打磨功能的設備末端����,比如機器人手臂,直接執(zhí)行打磨的預設指令���,機器人負責路徑的執(zhí)行�����。力控打磨功能:1.柔性控制:在打磨機接觸工作的瞬間��,以及運行過程中�,力控打磨以柔性浮動方式����,主動適應工件表面的尺寸變化���,將力的大小始終控制在所需范圍之內�。2.不受角度與奮力的影響:可對工件三維空間外形任何角度進行拋光打磨��。3.瞬間響應:力控打磨在運行過程中,可根據(jù)工件表面的變化���,瞬間浮動調整�,將力的大小控制在所設定范圍之內�。4.降低機器人示教精度要求:機器人示教只需設定好運行路徑,工件表面壓力由力控打磨完成����,機器人示教變得很簡單,減少了示教工作的時間���,提高了生產(chǎn)效率�����。5.分段力控功能:此功能可以根據(jù)機器人不同路徑��,分段設定每條路徑所需力的大小�����。6.配方功能:多可保存255個配方�,根據(jù)對應工件型號隨時調用���。7.兼容性:本產(chǎn)品適用于各個品牌機器人�����。8.吸振功能:可降低再打磨拋光過程中���,打磨機的高頻率振動對打磨機本身和機械手的損傷�����。DFC力控打磨目前有多個型號��,適合不同打磨����、拋光工作場景�。力控打磨力控打磨過程。銷售力控打磨歡迎咨詢大儒科技(蘇州)有限公司為您提供力控打磨 ��,歡迎新老客戶來電�����!

.根據(jù)權利要求1所述的一種基于六軸機器人的注塑件飛邊自動打磨設備���,其特征在于:所述的工作臺(1)沿其周邊設有框架(1-1)����,工作臺(1)上部的框架(1-1)兩側及后部設有可移動的透明有機玻璃板(1-2)�,框架(1-1)前部的兩立柱上安裝有光柵(1-3),工作臺(1)下部的框架(1-1)四周設有側板(1-5)�,且工作臺(1)下部的空腔用于安裝控制箱及電氣元器件,側板(1-5)上設有散熱器(1-6)����,工作臺(1)前部設有內凹的前儲物倉(1-4)和操作面板。3.根據(jù)權利要求1所述的一種基于六軸機器人的注塑件飛邊自動打磨設備�,其特征在于:所述的固定夾座(5-2)設有用于安裝氣磨(5-3)或電磨的安裝孔,且固定夾座(5-2)的一側設有與安裝孔相通的槽口��,固定夾座(5-2)設有貫穿槽口的連接孔�,固定夾座(5-2)的安裝孔內設有防止氣磨(5-3)或電磨旋轉的凹槽,氣磨���。
因需盡量準確地確定機器人運轉路徑���,編程工作繁復而耗時。傳統(tǒng)技術盡管在學說上可獲得恒定的研磨拋光質量,然而實情并不盡如人意�����,加工后的工件往往前后品質不一����,公差各不相同,難以得到安定的工藝效用����。關于繁雜結構的鑄件、毛刺散布分散的鑄件也能對應�����。而且機器人具可編程性�����,新的產(chǎn)品導入只需要改換工裝治具�����,次序切換就能完成���。這使裝置具更高的柔性化���,更適當目前企業(yè)的需要。同機遇器人去毛刺的方案能增加工友休息強度或間接省去工友����,無效確保加工質量分歧性,進步全體消費效率�,改善工廠任務環(huán)境。這些劣勢都是很明顯的��,縱使裝置投入本錢略高�,也越來越多被企業(yè)背負。隨著機械人力控技術的發(fā)展�����,浮動部門和打磨工具的使用����,如同人手滑過鑄件毛刺般開展柔性除去毛刺,能有效性避免導致打磨工具和鑄件的損壞���,吸收鑄件及定位等各方面的誤差�。力控打磨由二種先進的基本機能構成。一種是壓力控制機能���,當機器人展開工件打磨拋光時�,該機能可維持打磨工具對鑄件的壓力自始至終不變:另一種是變速控制功用�,當機器人對工件的表面或分型線展開去毛刺、去飛邊操作時��,該機能可持續(xù)操縱其操作速度�。大儒科技(蘇州)有限公司是一家專業(yè)提供力控打磨 的公司,有需求可以來電咨詢���!
因六關節(jié)機器人在定位精度����、運動耦合方面表現(xiàn)出極大的優(yōu)勢�,且工作空間大、工件易于夾持�����,其在自動化打磨應用中��,包括拋光�、打磨����、去毛刺等方面的應用越來越普遍�,但同時也面臨許多挑戰(zhàn):1)打磨過程是一個復雜的工藝過程,對其機理的研究還不夠深入�,使得自由曲面的打磨加工成為模具生產(chǎn)、制造中的薄弱環(huán)節(jié)和制約模具制造業(yè)發(fā)展的瓶頸�����;2)待加工表面復雜多樣��,需要一種靈活的��、適應性強的方式來控制打磨的精度��。目前�,打磨行業(yè)里應用機器人仍主要采用示教的方式�����,通過離線移動機器人到達目標點��,然后通過機器人編程語句逐點記錄���。其中���,為了得到要求的表面加工精度�����,還需要操作人員在過渡處插補點位以光順過渡調整機器人的位姿����。要完成一個復雜件的打磨作業(yè)�����,需要數(shù)天的示教及調試��,容易出錯�����,且對操作人員的熟練程度要求很高����。力控打磨 ,就選大儒科技(蘇州)有限公司�,有需求可以來電咨詢��!洛陽官方力控打磨歡迎咨詢
大儒科技(蘇州)有限公司力于提供力控打磨 �����,有想法可以來我司咨詢�。安徽力控打磨詳情
鑄件去毛刺去毛刺機器人工作分為接觸性和非接觸性兩類��。非接觸性作業(yè)如噴涂和弧焊�,這類機器人對軌跡位置控制精度的要求不高,但對于接觸式作業(yè)���,比如裝配、打磨����,如果還是按照傳統(tǒng)的位置控制的話,就會出現(xiàn)偏差�,導致容易導致過磨削或欠磨削。由此�,我們不得不提到柔順控制,柔順控制也分為主動型和被動型�����,鑄件去毛刺常用被動型柔順控制。在機器人末端會添加一個柔順機構�,當末端執(zhí)行器與工件發(fā)生接觸時,末端柔順執(zhí)行器能夠調整機器的運動軌跡����,從而實現(xiàn)力控。如常用的彈簧(橡皮)浮動和氣浮動力控打磨頭���,當接觸力過大時��,打磨頭會遠離工件的方向進行偏移運動�,當接觸力過小時���,打磨頭會靠近工件方向運動�����,從而實現(xiàn)衡力打磨�����。而閉環(huán)控制器+浮動順隨補償器和伺服電主軸的出現(xiàn)又將這種柔順控制升級了��,更好的實現(xiàn)了軌跡位置補償和加工速度控制��。安徽力控打磨詳情